Implementation of local to point image processing interface. More...
#include <ImageLocalProcessingImpl.h>
Public Member Functions | |
Convolution services | |
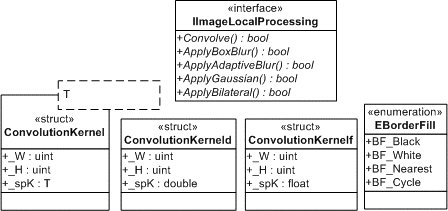
| virtual bool | Convolve (AbstractImage &ioImage, const Math::ConvolutionKerneld &iKernel, bool ibAbsolute, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Convolve with a kernel. | |
| virtual bool | Convolve (AbstractImage &ioImage, const Math::ConvolutionKerneld &iKernel, double iThresholdMin, double iThresholdMax, bool ibAbsolute, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Convolve with a kernel on thresholded values. | |
| virtual bool | Convolve (AbstractImage &ioImage, const Math::ConvolutionKerneld &iKernel1, const Math::ConvolutionKerneld &iKernel2, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Convolve with two separable kernels [Wx1] x [1xH]. | |
| virtual bool | ApplyGaussian (AbstractImage &ioImage, double iRadius, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Gaussian filter smooths the current image by convolving a Gaussian kernel sized by iRadius and computed variance based of radius. | |
| virtual bool | ApplyGaussian (AbstractImage &ioImage, double iRadius, double iVariance, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Gaussian filter smooths the current image by convolving a Gaussian kernel sized by iRadius and with the selected iVariance. | |
| virtual bool | ApplyGaussian (AbstractImage &ioImage, uint32 iWidth, uint32 iHeight, double iVariance, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Gaussian filter smooths the current image by convolving a Gaussian kernel(iWidth,iHeight) with the selected iVariance. | |
| virtual bool | ApplyBoxBlur (AbstractImage &ioImage, uint32 iWidth, uint32 iHeight, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Box blur filter, this is the blur filter with best performance with int64 kernel. | |
| virtual bool | ApplySelectiveBlur (AbstractImage &ioImage, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Adaptive blur filter, this is a blur filter that protects edges. | |
| virtual bool | ApplyBilateral (AbstractImage &ioImage, double iRadius, double iSigmaSpatial, double iSigmaRange, EBorderFill iBorder, uint32 iIteration, uint32 iChannelMask, ProgressNotifier &iNotifier) const |
| Apply bilateral filter to an image by means of a nonlinear combination of nearby image values. | |
Static Public Member Functions | |
Specialized static services | |
| static bool | Convolve3x3 (ImageImpl< Pixel > &ioImage, const Math::ConvolutionKerneld &iKernel, double iThresholdMin=0.0, double iThresholdMax=1.0, bool ibAbsolute=false, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | Convolve5x5 (ImageImpl< Pixel > &ioImage, const Math::ConvolutionKerneld &iKernel, double iThresholdMin=0.0, double iThresholdMax=1.0, bool ibAbsolute=false, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | ConvolveWxH (ImageImpl< Pixel > &ioImage, const Math::ConvolutionKerneld &iKernel, double iThresholdMin=0.0, double iThresholdMax=1.0, bool ibAbsolute=false, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | Convolve (ImageImpl< Pixel > &ioImage, const Math::ConvolutionKerneld &iKernel, double iThresholdMin=0.0, double iThresholdMax=1.0, bool ibAbsolute=false, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | Convolve (ImageImpl< Pixel > &ioImage, const Math::ConvolutionKerneld &iKernel1, const Math::ConvolutionKerneld &iKernel2, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | ApplyBoxBlur (ImageImpl< Pixel > &ioImage, uint32 iWidth, uint32 iHeight, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | ApplySelectiveBlur (ImageImpl< Pixel > &ioImage, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | ApplyGaussian (ImageImpl< Pixel > &ioImage, double iRadius=1.5, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | ApplyGaussian (ImageImpl< Pixel > &ioImage, double iRadius, double iVariance, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | ApplyGaussian (ImageImpl< Pixel > &ioImage, uint32 iWidth, uint32 iHeight, double iVariance, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
| static bool | ApplyBilateral (ImageImpl< Pixel > &ioImage, double iRadius=2.5, double iSigmaSpatial=1.0, double iSigmaRange=1.0, EBorderFill iBorder=BF_Nearest, uint32 iIteration=1, uint32 iChannelMask=CM_All, ProgressNotifier &iNotifier=ProgressNotifier_NULL) |
Detailed Description
template<class Pixel>
class eLynx::Image::ImageLocalProcessingImpl< Pixel >
Implementation of local to point image processing interface.
Member Function Documentation
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::ApplyBilateral | ( | AbstractImage & | ioImage, |
| double | iRadius, | ||
| double | iVarianceSpatial, | ||
| double | iVarianceRange, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Apply bilateral filter to an image by means of a nonlinear combination of nearby image values.
| [1] | Bilateral Filtering for Gray and Color Images by C. Tomasi and R. Manduchi |
| [2] | Fast Bilateral Filtering for the Display of High-Dynamic-Range Images by Fr�do Durand and Julie Dorsey Laboratory for Computer Science, Massachusetts Institute of Technology |
| [3] | SEPARABLE BILATERAL FILTERING FOR FAST VIDEO PREPROCESSING by Tuan Q. Pham and Lucas J. van Vliet Quantitative Imaging Group, Department of Imaging Science and Technology Delft University of Technology |
- Parameters:
-
ioImage image to be convolved. iRadius size of squared Gaussian kernel, the higher the slower. iVarianceSpatial variance of Gaussian spatial filter. iVarianceRange variance of Gaussian range filter. iBorder how to fill border. iIteration number of iterations. Default is 1. iChannelMask selected channels to be processed. Default is all channels. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::ApplyBoxBlur | ( | AbstractImage & | ioImage, |
| uint32 | iWidth, | ||
| uint32 | iHeight, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Box blur filter, this is the blur filter with best performance with int64 kernel.
Implementation is based on this article:
| [1] | Fast Image Convolutions by Wojciech Jarosz SIGGRAPH 2001 |
- Parameters:
-
ioImage image to blur. iWidth kernel width. iHeight kernel height. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::ApplyGaussian | ( | AbstractImage & | ioImage, |
| double | iRadius, | ||
| double | iVariance, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Gaussian filter smooths the current image by convolving a Gaussian kernel sized by iRadius and with the selected iVariance.
- Parameters:
-
ioImage image to be blured. iRadius size of squared Gaussian kernel. iVariance variance of Gaussian curve. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::ApplyGaussian | ( | AbstractImage & | ioImage, |
| double | iRadius, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Gaussian filter smooths the current image by convolving a Gaussian kernel sized by iRadius and computed variance based of radius.
- Parameters:
-
ioImage image to be blured. iRadius size of squared Gaussian kernel. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::ApplyGaussian | ( | AbstractImage & | ioImage, |
| uint32 | iWidth, | ||
| uint32 | iHeight, | ||
| double | iVariance, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Gaussian filter smooths the current image by convolving a Gaussian kernel(iWidth,iHeight) with the selected iVariance.
- Parameters:
-
ioImage image to be blured. iWidth width of Gaussian kernel. iHeight height of Gaussian kernel. iVariance variance of Gaussian curve. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::ApplySelectiveBlur | ( | AbstractImage & | ioImage, |
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Adaptive blur filter, this is a blur filter that protects edges.
Based on Selective blur by Daniel Lacroix.
- Parameters:
-
ioImage image to blur. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::Convolve | ( | AbstractImage & | ioImage, |
| const Math::ConvolutionKerneld & | iKernel, | ||
| double | iThresholdMin, | ||
| double | iThresholdMax, | ||
| bool | ibAbsolute, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Convolve with a kernel on thresholded values.
- Parameters:
-
ioImage image to be convolved. iKernel the convolution kernel [WxH]. iThresholdMin Threshold min to apply filter. iThresholdMax Threshold max to apply filter. ibAbsolute true to use absolute value of convolution, false otherwise. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::Convolve | ( | AbstractImage & | ioImage, |
| const Math::ConvolutionKerneld & | iKernel, | ||
| bool | ibAbsolute, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Convolve with a kernel.
- Parameters:
-
ioImage image to be convolved. iKernel the convolution kernel [WxH]. ibAbsolute true to use absolute value of convolution, false otherwise. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
| virtual bool eLynx::Image::ImageLocalProcessingImpl< Pixel >::Convolve | ( | AbstractImage & | ioImage, |
| const Math::ConvolutionKerneld & | iKernel1, | ||
| const Math::ConvolutionKerneld & | iKernel2, | ||
| EBorderFill | iBorder, | ||
| uint32 | iIteration, | ||
| uint32 | iChannelMask, | ||
| ProgressNotifier & | iNotifier | ||
| ) | const [virtual] |
Convolve with two separable kernels [Wx1] x [1xH].
Greatly improve performance compare to convolution with [WxH] filter. Algorithm descrition: Convolution with separative kernels
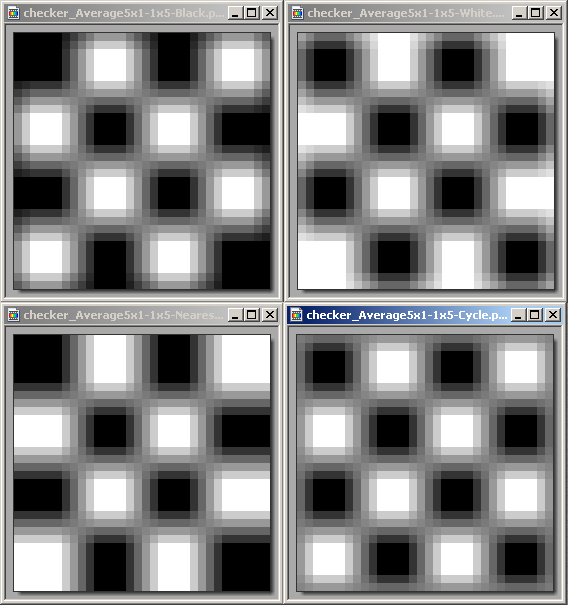
iBorder effects |
Using iBorder with BF_Cycle on a cyclic image, image remains cyclic after convolution.
- Parameters:
-
ioImage image to be convolved. iKernel1 a convolution kernel [Wx1] or [1xH]. iKernel2 a convolution kernel, if iKernel1 is [Wx1] must be [1xH], else [Wx1]. iBorder how to fill border. iIteration number of iterations. iChannelMask selected channels to be processed. Default is all. iNotifier a notifier for progression, log and cancel.
- Returns:
- Method running status.
Implements eLynx::Image::IImageLocalProcessing.
The documentation for this class was generated from the following file:
- E:/dev/eLynx/include/elx/image/ImageLocalProcessingImpl.h